日前,機(jī)械工程學(xué)院國(guó)凱課題組在電氣和電子工程師協(xié)會(huì)主辦的機(jī)電領(lǐng)域Top期刊IEEE Transactions on Industrial Electronics(中科院JCR期刊1區(qū),IF=7.503)上發(fā)表論文��,題目為“Composite Learning Robot Control With Friction Compensation: A Neural Network-Based Approach”�����,該成果于2020年1月入選為Web of Science高被引論文��。機(jī)械工程學(xué)院國(guó)凱助理研究員為論文第一作者,山東大學(xué)為第一完成單位����。該項(xiàng)工作得到了國(guó)家自然科學(xué)基金面上項(xiàng)目、青年項(xiàng)目����,山東省重點(diǎn)研發(fā)計(jì)劃和山東大學(xué)青年學(xué)者未來(lái)計(jì)劃等項(xiàng)目的資助。
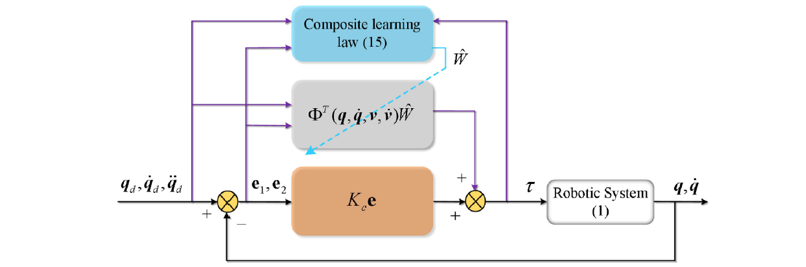
由于機(jī)器人系統(tǒng)存在復(fù)雜的非線性特性��,系統(tǒng)中的未建模動(dòng)態(tài)和外干擾會(huì)對(duì)高性能軌跡跟蹤控制產(chǎn)生較大不利影響����。在傳統(tǒng)的機(jī)器人自適應(yīng)控制方法中,多基于持續(xù)激勵(lì)條件假設(shè)����,導(dǎo)致控制結(jié)果較為保守�����,適用性受到限制��。在該研究中�����,國(guó)凱課題組針對(duì)機(jī)器人高性能軌跡跟蹤控制中的未知參數(shù)精確建模��、辨識(shí)及補(bǔ)償問題��,提出了一種神經(jīng)網(wǎng)絡(luò)復(fù)合學(xué)習(xí)控制方法�����。針對(duì)系統(tǒng)未知參數(shù)進(jìn)行在線復(fù)合自適應(yīng)學(xué)習(xí)��,通過歷史數(shù)據(jù)和在線數(shù)據(jù)并聯(lián)驅(qū)動(dòng)未知參數(shù)實(shí)時(shí)更新�����,在interval-excitation條件下即可保證參數(shù)估計(jì)值收斂����。針對(duì)復(fù)合學(xué)習(xí)過程中的變量替換問題,提出了分區(qū)神經(jīng)網(wǎng)絡(luò)控制結(jié)構(gòu)����,提高了非線性不確定項(xiàng)的學(xué)習(xí)精度,避免了對(duì)系統(tǒng)信號(hào)高階導(dǎo)數(shù)項(xiàng)的需求��,提高了閉環(huán)系統(tǒng)的魯棒性����。該工作證明了神經(jīng)網(wǎng)絡(luò)復(fù)合學(xué)習(xí)控制方法的有效性和優(yōu)越性�����,為機(jī)器人高性能控制提供了新思路�����。
在過去幾年內(nèi)����,該課題組在機(jī)器人、機(jī)電系統(tǒng)非線性控制等方面進(jìn)行了深入研究��,連續(xù)在機(jī)電領(lǐng)域的多個(gè)著名期刊Automatica、IEEE Transactions on Industrial Electronics��、Automation In Construction等發(fā)表多篇高水平論文��。
相關(guān)鏈接:https://ieeexplore.ieee.org/document/8584486